![形を制御できる曲面形状ロボット[信州大学・繊維学部]](https://shinshu-tlo.co.jp/technology/technologywp/wp-content/uploads/2025/03/251.jpg)
曲面形状ロボット について
浸透したスマートフォンの次に生活を一変させるものとして「形を統合するデバイス」の可能性が模索されます。
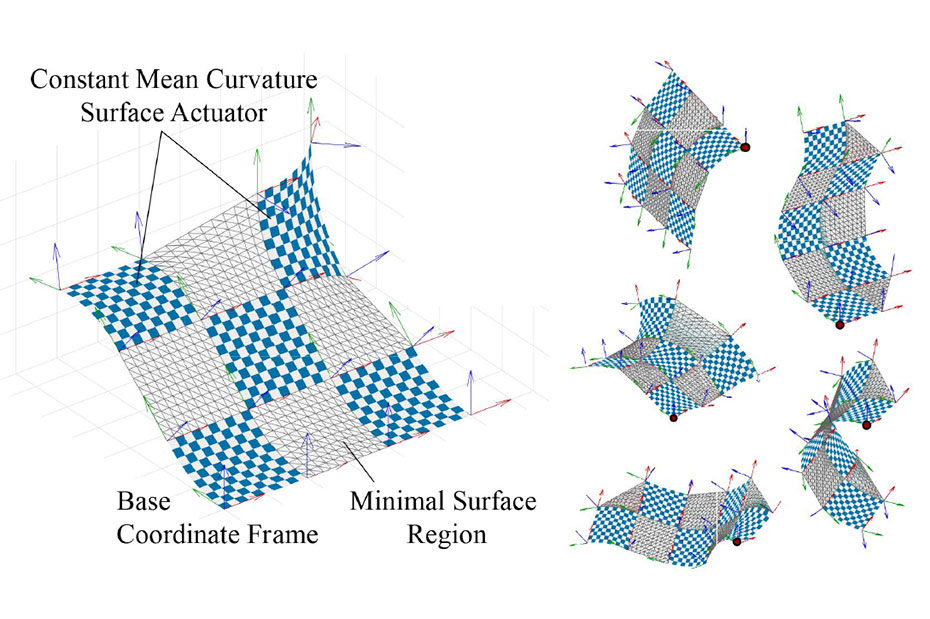
本技術は、曲線形状マニピュレータの区分的に曲率一定モデル(よく利用されるモデル)の曲面版であり、NURBSのように制御点の位置を指定するのではなく、アクチュエータの曲率や伸び率を指定する方法を採ります。
ロボットを制御するのに即しています。
【基本情報】
自由度の高い複雑曲面を表現するロボットを構成するシート状アクチュエータの各々を、指定された平均曲率一定曲面に沿った曲面形状に変形させます。
平均曲率一定曲面とは、球面、円柱面、カテノイド(懸垂曲面)、アンデュロイド、ノドイドです。
これらの形状関数は容易に書くことが可能ですので、少ないパラメータ設定でロボットの複雑曲面を表現できます。
特長
- 腹腔鏡内視鏡下手術の支援システム
- 主要タスク:大域的に体内の術野空間(腹壁形状)をデザイン
- 二次的タスク:局所的に臓器を圧排
基本情報
- 研究機関
- 信州大学 繊維学部
- 特許情報
-
「区分的に平均曲率一定な曲面形状ロボット」
出願番号:PCT/JP2022/022043 - 関連リンク
- https://fiber.shinshu-u.ac.jp/iwamoto/research.html
一様な形状でなく、部分的に異なる形状をとることを要求されるシステムに適用できます。これによりロボットの価値が高まります。
![歪んだ二次元コードを正確に復元する技術[鹿児島大学]](https://shinshu-tlo.co.jp/technology/technologywp/wp-content/uploads/2026/01/QR‗アイキャッチ.png)
![教師付データ合成による高精度変化検出技術[鹿児島大学]](https://shinshu-tlo.co.jp/technology/technologywp/wp-content/uploads/2026/01/教師付_アイキャッチ2.png)
![高造影・低負担の両立に向けた新発想のX線・CT造影剤設計[信州大学・繊維学部]](https://shinshu-tlo.co.jp/technology/technologywp/wp-content/uploads/2025/12/アイキャッチ画像.png)
